





YN999SHOP
Stepping Four-axis Scara Manipulator Manipulator Teaching Robot Lightweight Handling Industrial Robot
Stepping Four-axis Scara Manipulator Manipulator Teaching Robot Lightweight Handling Industrial Robot
Couldn't load pickup availability
Manipulator parameters:
| project |
parameter |
remarks |
| power |
42Stepper motor |
All four axes are used42Stepper motor model:42BYGH47-401A Two hybrid stepping motor Maximum driving current:1.5A driving voltage :24V Number of leads:4 Step angle:1.8degree surface temperature :80℃MAX(At rated current) Maximum static moment: 0.55N.M Phase resistance:1.6Ω |
| Weight bearing |
End load of manipulator2kg |
Weight with actuator |
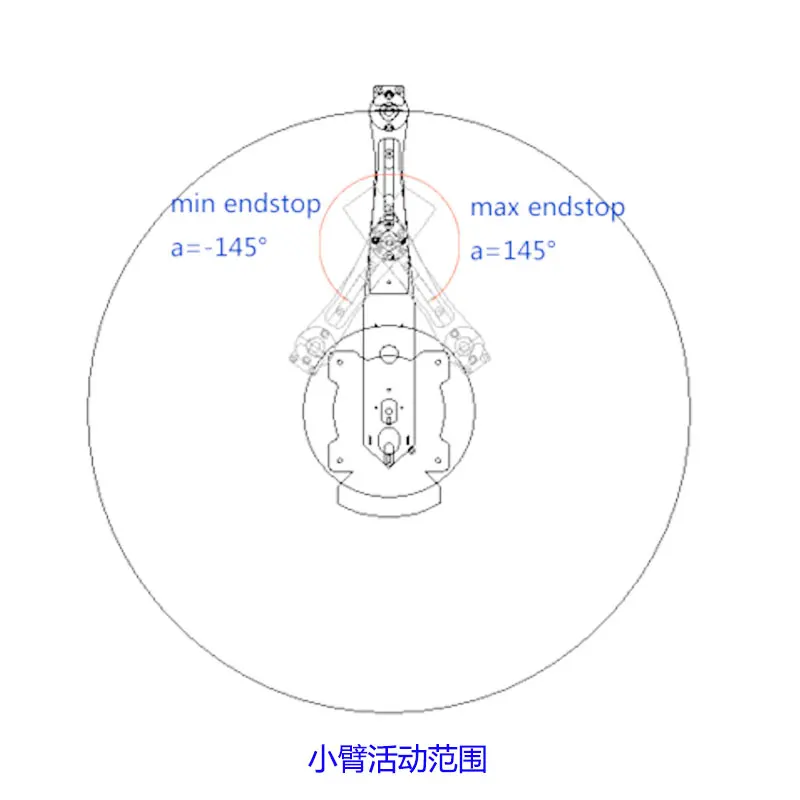
| Rotation range
|
Boom rotation360°+ Jib rotation0°~290° Wrist rotation360°+
|
|
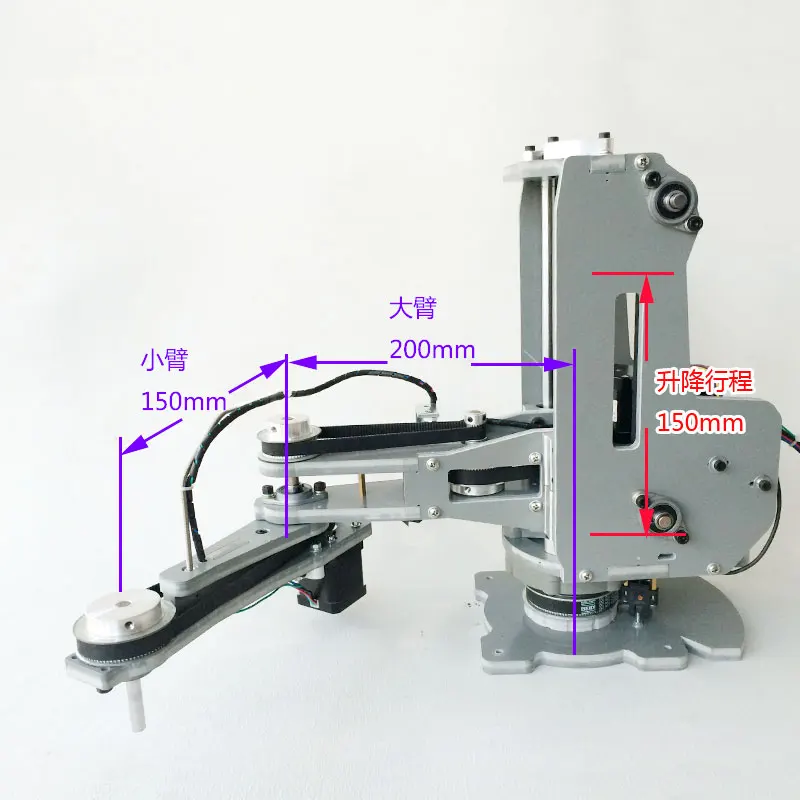
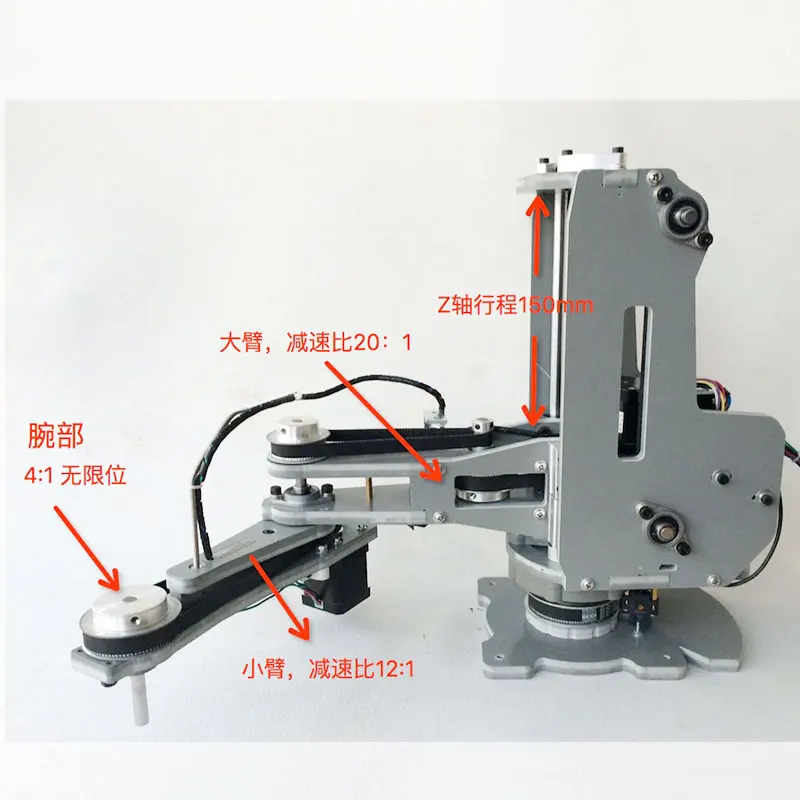
| Arm length |
Big arm:200mm Forearm:150mm ZShaft lifting 0~150mm |
|
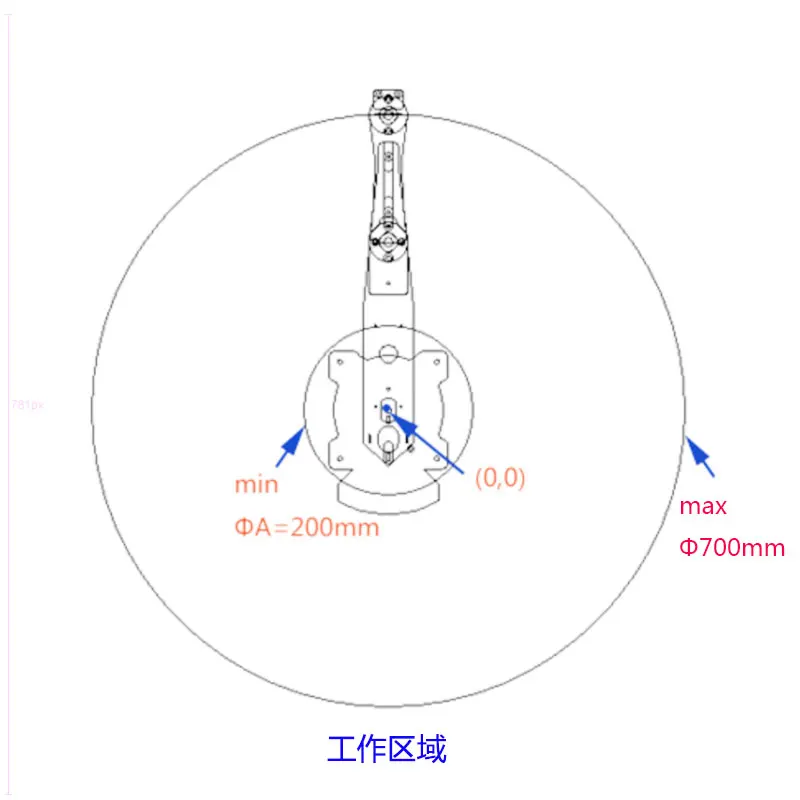
| Work area |
See the figure below |
|
| texture of material |
The main plates arePVCengineering plastic |
|
| weight |
Dead weight of manipulator body7.5kg |
Packing weight9kg |
| External dimension |
long500mm*wide180mm*high350mm Mechanical arm reservation70cmOutgoing line。 |
|
Mechanical arm size:
\\
\\
\\
\\
\\
Mechanical arm detail picture: -----------------------------------------------------------------
\\
\\
\\
\\
Base size: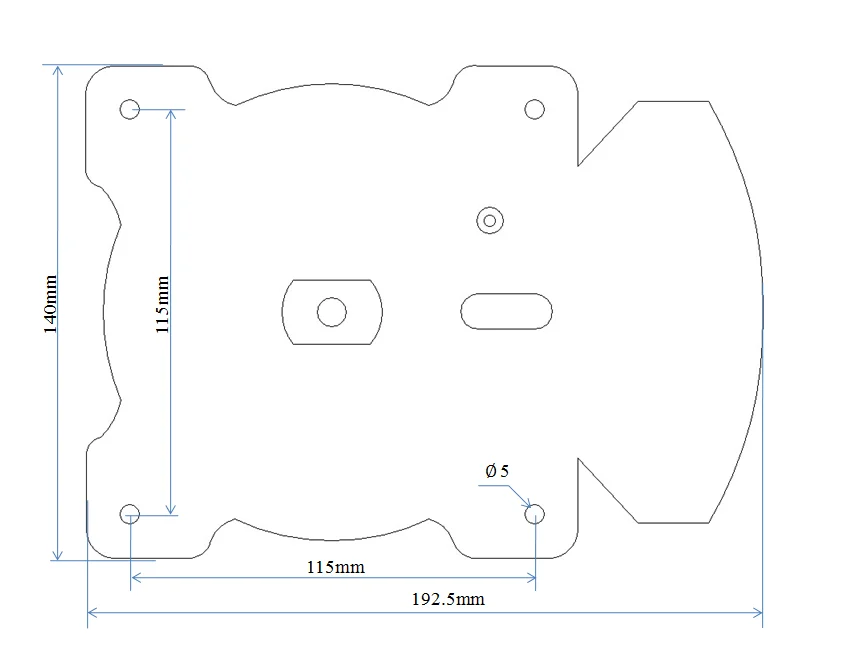






Collections
-

Coffee Machine
Coffee Machine Italian Full & Semi Automatic Household Cafetière Small Foam Grinding...
-

Drill brush
Drill brush
-

Heavyweight silk
Heavyweight silk , French silk cotton lace bed set with four pieces
-

Massage chair
Luxury Smart Full-Body Zero-Gravity Shiatsu Massage Chair Airbag Surround Bluetooth Music Massage...
-

Wedding Dress
Women Luxury Beaded Bridal Mermaid Wedding Dress Floral Ruffles Sparkly Illusion














